

Sterownik silników DC do Raspberry Pi - PCB do projektu AVT 5414

- Umożliwia budowę modułu rozszerzeń Raspberry Pi do sterowania dwoma silnikami prądu stałego 8…50 V / do 2,8 A, z wejściami EN/DIR i dodatkowymi złączami GPIO 3,3 V. Wersja A zawiera płytkę PCB.
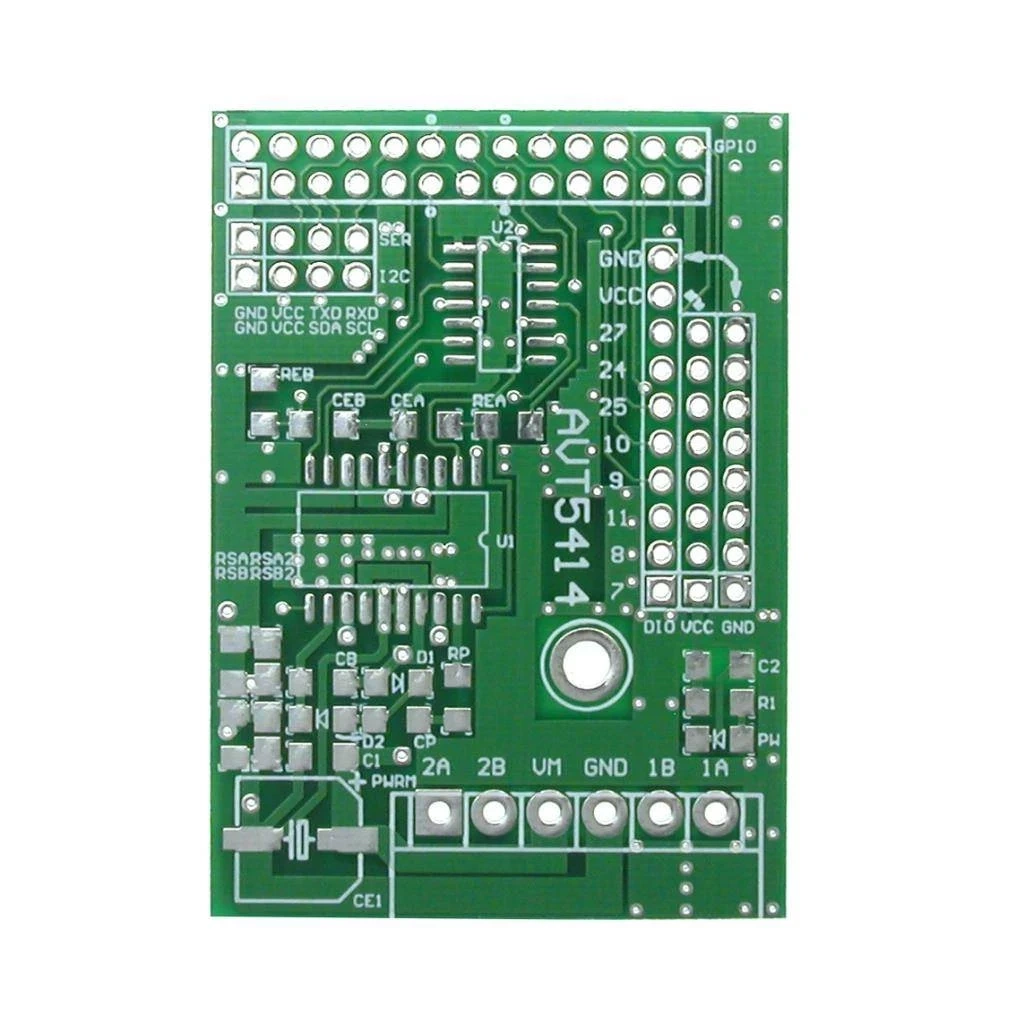
Moduł rozszerzeń dla Raspberry Pi - płytka drukowana do AVT5414
Płytka PCB do wykonania sterownika dwóch silników prądu stałego dla Raspberry Pi.
Sterowanie napędami DC z Raspberry Pi
AVT5414 to projekt modułu RaspbPI_DCM, który rozszerza Raspberry Pi o możliwość sterowania dwoma silnikami prądu stałego średniej mocy. Moduł jest przeznaczony do aplikacji mobilnych, prostych robotów, mechanizmów wykonawczych i eksperymentów z napędami DC.
Sterowanie odbywa się w wygodnej konwencji EN/DIR, czyli osobno dla włączenia lub regulacji PWM oraz kierunku obrotów każdego silnika. Zasilanie silników jest doprowadzane z zewnętrznego źródła, niezależnie od zasilania części logicznej Raspberry Pi. Wersja A obejmuje samą płytkę PCB; sterownik silników, układ logiki, złącza, elementy SMD, elementy filtrujące, diodę sygnalizacyjną i złącze zasilania silników trzeba skompletować osobno.
Karta techniczna
AVT5414
Moduł rozszerzeń Raspberry Pi do sterowania dwoma silnikami prądu stałego, z oddzielnym zasilaniem części mocy i dodatkowymi złączami sygnałowymi.
| Wersja | A - płytka PCB |
| Typ modułu | sterownik silników prądu stałego dla Raspberry Pi |
| Nazwa modułu w dokumentacji | RaspbPI_DCM |
| Kompatybilność bazowa | Raspberry Pi Rev2 ze złączem GPIO P1 26-pin według opisu dokumentacji |
| Liczba sterowanych silników | 2 silniki prądu stałego |
| Zakres napięcia silników | 8…50 V DC |
| Maksymalny prąd obciążenia | do 2,8 A |
| Topologia wyjść silnikowych | dwa mostki H do dwukierunkowego sterowania silnikami DC |
| Sterowanie z Raspberry Pi | sygnały EN i DIR dla każdego silnika |
| Regulacja prędkości | możliwa przez sterowanie PWM sygnałem EN |
| Sterowanie kierunkiem | poziom logiczny DIR wybiera kierunek obrotów silnika |
| Zasilanie części mocy | zewnętrzne źródło zasilania silników, oddzielone od zasilania sterowania |
| Zasilanie części logicznej | z płytki Raspberry Pi |
| Standard sygnałów GPIO | 3,3 V |
| Dodatkowe wyprowadzenia GPIO | 8 sygnałów GPIO 3,3 V do czujników lub dodatkowych układów współpracujących |
| Dodatkowe magistrale | wyprowadzenia I2C oraz komunikacji szeregowej |
| Pomiar prądu silników | możliwy przez wyprowadzenia pomiarowe prądu kanałów silnikowych |
| Zabezpieczenia sterownika | zabezpieczenia przed przeciążeniem i przegrzaniem wbudowane w specjalizowany sterownik silników |
| Sygnalizacja zasilania | dioda LED informująca o obecności napięcia 3,3 V |
| Przykładowe oprogramowanie testowe | WebIOPi według opisu dokumentacji |
| Płytka PCB | 55×40 mm |
Wersja A - płytka PCB i wykaz elementów
AVT5414 A - płytka PCB. Specjalizowany sterownik silników, układ logiki, diody, dioda LED, elementy SMD, złącze GPIO, złącze zasilania silników, złącza sygnałowe oraz elementy filtrujące trzeba skompletować osobno.
| Rezystory SMD 1206 | R1 - 1kΩ; REA, REB - 100kΩ; RP - 100Ω; RSA1, RSB1 - 1Ω / 0,5 W; RSA2, RSB2 - zwory SMD według opisu dokumentacji |
| Kondensatory | C1, C2, CB - 220nF / 50 V; CE1 - 47µF / 50 V low ESR; CEA, CEB - 5,6nF; CP - 10nF / 50 V |
| Półprzewodniki | D1, D2 - LL4148 SMD; PW - dioda LED SMD; U1 - L6205; U2 - HC86 |
| Złącza | DIO - złącze SIP10 2,54 mm; GND, VCC - złącza SIP8 2,54 mm; GPIO - złącze IDC26; I2C, SER - złącza SIP4 2,54 mm; PWRM - złącze MC1.5_381 kompletne |
Notes
Zasilanie silników należy doprowadzić z zewnętrznego źródła przez złącze PWRM. Nie jest ono pobierane z Raspberry Pi, ponieważ część mocy wymaga osobnego zasilania dopasowanego do użytych silników.
Moduł wykorzystuje standardową konwencję sterowania EN/DIR. W praktyce sygnał EN można wykorzystać do załączania kanału albo do regulacji PWM, a sygnał DIR do wyboru kierunku obrotów.
Jeżeli pomiar prądu silnika nie jest potrzebny, dokumentacja przewiduje zastosowanie zwór w torach pomiarowych. Jeśli pomiar ma być używany, należy dobrać i podłączyć układ pomiarowy zgodnie z wymaganiami aplikacji.
Do szybkiego sprawdzenia pracy modułu dokumentacja proponuje WebIOPi. Po uruchomieniu interfejsu WWW można wykorzystać GPIO17/GPIO18 do załączania silnika oraz GPIO22/GPIO23 do sterowania kierunkiem obrotów.
Płytka PCB ma wymiary 55×40 mm, co ułatwia montaż modułu w konstrukcjach mobilnych, robotycznych i aplikacjach z Raspberry Pi.
Uwaga: GPIO Raspberry Pi pracują w standardzie 3,3 V. Podanie napięcia 5 V na linie GPIO może uszkodzić minikomputer. Zasilanie silników 8…50 V należy prowadzić osobno, z zachowaniem poprawnej polaryzacji, filtracji i zapasu prądowego; przeciążony albo zablokowany silnik może powodować duże prądy i nagrzewanie części mocy.
Najczęściej zadawane pytania
Moduł jest przeznaczony do sterowania dwoma silnikami prądu stałego. Każdy kanał ma osobne sterowanie włączeniem lub PWM oraz kierunkiem obrotów.
Nie. Raspberry Pi zasila część logiczną, natomiast silniki wymagają osobnego zewnętrznego zasilacza 8…50 V. To ważne, bo prąd silników jest zbyt duży dla zasilania dostępnego z Raspberry Pi.
Prędkość można regulować sygnałem PWM podanym na wejście EN danego kanału. Wypełnienie PWM decyduje o średniej energii dostarczanej do silnika, a kierunek obrotów wybiera sygnał DIR.
Tak. Oprócz sterowania silnikami moduł wyprowadza dodatkowe linie GPIO 3,3 V, magistralę I2C oraz port komunikacji szeregowej. Można je wykorzystać do czujników lub dodatkowych układów, o ile zachowane są poziomy logiczne 3,3 V.
Raspberry Pi nie toleruje 5 V na liniach GPIO. Wszystkie sygnały sterujące i czujnikowe podłączane do modułu muszą być zgodne z poziomami 3,3 V albo przechodzić przez konwertery poziomów.





