

Robot Line Follower Enhanced - PCB do projektu AVT 3028

- Umożliwia budowę robota Line Follower Enhanced wykrywającego linię i omijającego przeszkody. Wersja A zawiera dwie płytki PCB do projektu AVT3028; elementy należy skompletować osobno.
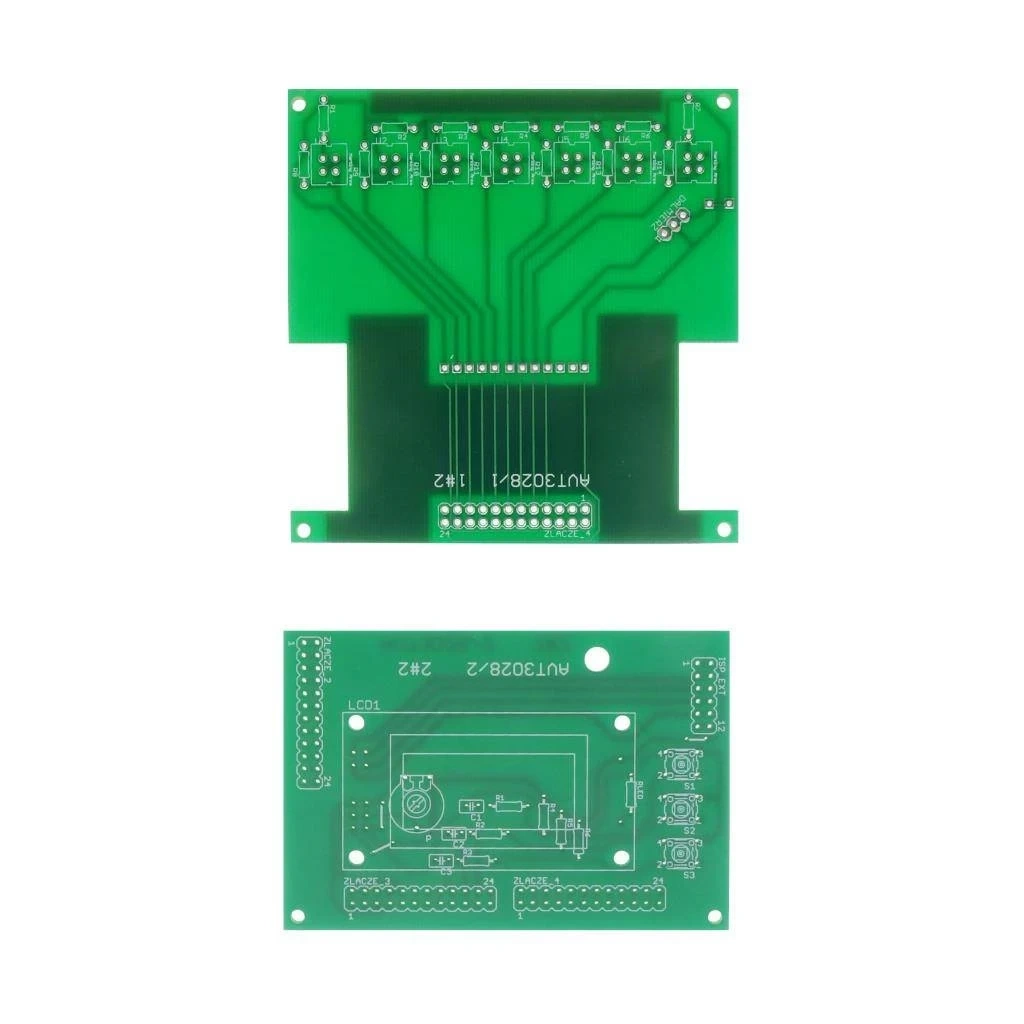
Robot Line Follower Enhanced - płytki drukowane do AVT3028
Płytki PCB do budowy robota LFE wykrywającego linię i omijającego przeszkody na trasie.
Robot do konkurencji Line Follower Enhanced
AVT3028 to projekt robota kategorii LFE, czyli Line Follower Enhanced. Konstrukcja jest przeznaczona do jazdy po kontrastowej linii, a dodatkowo umożliwia wykrywanie i omijanie przeszkód znajdujących się na torze.
Robot wykorzystuje zespół czujników odbiciowych do śledzenia linii, optyczny dalmierz do wykrywania przeszkód oraz sterowanie silnikami przez PWM. Projekt sprawdza się jako platforma do nauki robotyki mobilnej, kalibracji czujników, strojenia algorytmu jazdy i eksperymentów z mechaniką małych robotów autonomicznych.
Karta techniczna
AVT3028
Płytki do budowy robota Line Follower Enhanced współpracującego ze sterownikiem AVT2935 i modułami czujników.
| Wersja | A - płytki PCB |
| Typ projektu | robot mobilny kategorii Line Follower Enhanced |
| Funkcja robota | jazda po kontrastowej linii i omijanie przeszkód |
| Czujniki linii | 7 kanałów czujników odbiciowych IR |
| Wykrywanie przeszkód | optyczny dalmierz odległości SHARP GP2D120, zasięg do 30 cm, martwa strefa do 4 cm |
| Obsługa czujników | odczyt przez 8 kanałów ADC sterownika robota |
| Sterowanie napędem | regulacja prędkości silników przez PWM |
| Tryby pracy projektu | jazda po linii z omijaniem przeszkód, kalibracja czujników, stan bezczynności |
| Kompatybilność | sterownik robota AVT2935 |
| Płytki PCB | 89x90 mm oraz 89x61 mm |
Wersja A - płytki PCB i wykaz elementów
AVT3028 A - płytki PCB. Elementy elektroniczne, mechaniczne i wykonawcze potrzebne do budowy robota trzeba skompletować osobno.
| Moduł czujników - rezystory | R1-R7 - 240Ω; R8-R14 - 10kΩ |
| Moduł czujników - sensory | U1-U7 - transoptory odbiciowe CNY70 |
| Moduł czujników - połączenia | złącza goldpin oraz wyprowadzenie sygnałów dla dalmierza |
| Moduł wyświetlacza - rezystory | R1-R3 - 200kΩ; R4-R6 - 10kΩ; RLED - zależnie od koloru podświetlenia, 470Ω-1kΩ |
| Moduł wyświetlacza - elementy regulacyjne i filtrujące | P - potencjometr liniowy 10kΩ; C1-C3 - 100nF |
| Moduł wyświetlacza - interfejs użytkownika | S1-S3 - przyciski tact-switch; wyświetlacz LCD 8x2 z podświetleniem; złącza goldpin |
| Elementy poza płytkami | sterownik AVT2935, dalmierz SHARP GP2D120, napęd, zasilanie, elementy dystansowe i mechaniczne zgodnie z dokumentacją projektu |
Notes
Przed zakupem płytek należy zapoznać się z dokumentacją AVT3028 oraz AVT2935. Projekt AVT3028 wykorzystuje sterownik AVT2935, dlatego do zbudowania kompletnego robota potrzebne są informacje z obu dokumentacji.
Wersja A obejmuje płytki PCB. Do zbudowania kompletnego robota potrzebne są dodatkowe elementy elektroniczne, mechaniczne, napęd, czujnik odległości, sterownik AVT2935 i odpowiednio przygotowany program.
Uruchomienie robota wymaga kalibracji progów wykrywania linii dla transoptorów oraz progu wykrywania przeszkody dla dalmierza. W praktyce progi należy dobrać na docelowej trasie, przy rzeczywistym oświetleniu i wysokości czujników.
Przy doborze napędu trzeba uwzględnić prąd silników i możliwości mostka H. Dokumentacja zwraca uwagę, że zbyt duży pobór prądu może przekroczyć bezpieczny poziom około 600 mA na kanał, dlatego warto ograniczyć maksymalne wypełnienie PWM.
Uwaga: przekroczenie dopuszczalnego prądu kanału mostka H może uszkodzić układ sterowania napędem. Przed trwałym podłączeniem silników należy dobrać ograniczenie prędkości i maksymalne wypełnienie PWM do zastosowanego napędu.
Najczęściej zadawane pytania
AVT3028 wykorzystuje sterownik AVT2935 jako podstawowy moduł sterujący robota. Dokumentacja AVT3028 opisuje moduły czujników, LCD i konstrukcję LFE, ale pełne zrozumienie sterowania, złączy, zasilania i programu wymaga również dokumentacji AVT2935.
Moduły AVT3028 są projektowane do konstrukcji warstwowej współpracującej ze sterownikiem AVT2935. Zgodność rozmieszczenia złączy decyduje o poprawnym połączeniu sygnałów ADC, zasilania, linii LCD i interfejsu użytkownika bez przeróbek mechanicznych.
Siedem transoptorów pozwala dokładniej określić położenie robota względem linii i zapamiętać, który czujnik ostatnio widział trasę. To ułatwia korekcję kierunku i powrót na linię po chwilowej utracie kontrastu lub przy wyjechaniu poza tor.
Progi ADC należy dobrać na docelowej trasie, przy realnym oświetleniu i docelowej wysokości czujników. Dalmierz SHARP GP2D120 ma nieliniową charakterystykę oraz martwą strefę do około 4 cm, dlatego próg przeszkody trzeba ustalić eksperymentalnie, a nie wyłącznie na podstawie odległości nominalnej.
Ograniczeniem jest prąd pobierany przez silniki oraz wytrzymałość mostka H w sterowniku. Dokumentacja wskazuje, że większe napięcie i zbyt wysokie wypełnienie PWM mogą zwiększyć pobór prądu do poziomu zagrażającego mostkowi, dlatego przed trwałym podłączeniem napędu trzeba dobrać maksymalne PWM dla obu kanałów.





