

Pojazd sterowany przez Bluetooth - PCB i mikroprocesor do projektu AVT 2931

- Pozwala zbudować pojazd RC sterowany telefonem przez Bluetooth, z trybem automatycznej jazdy i omijania przeszkód. Wersja A+ zawiera płytkę PCB oraz zaprogramowany mikrokontroler.
Pojazd sterowany przez Bluetooth – robot RC z trybem automatycznym AVT2931
Układ pozwala zbudować mały pojazd RC sterowany z telefonu przez Bluetooth lub pracujący samodzielnie w trybie automatycznym.
Pojazd Bluetooth z jazdą automatyczną i sterowaniem z telefonu
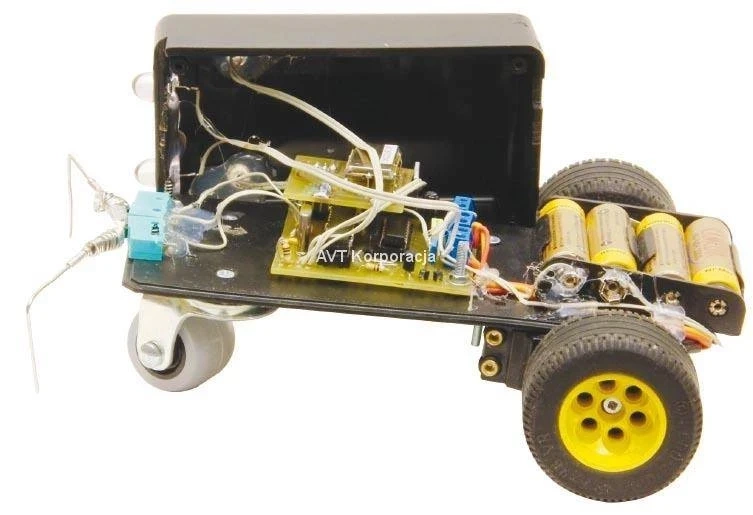
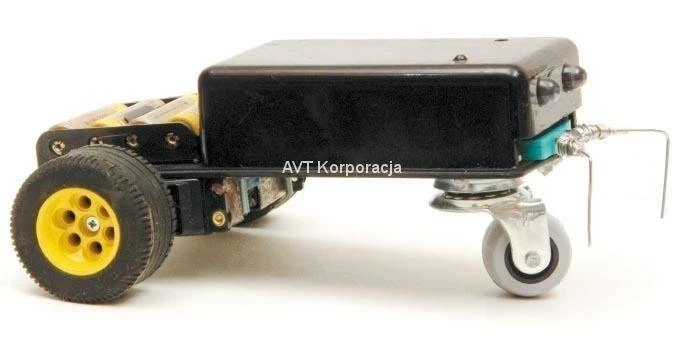
AVT2931 umożliwia wykonanie pojazdu sterowanego przez Bluetooth. Po włączeniu zasilania układ domyślnie pracuje w trybie automatycznym: jedzie do przodu, a po wykryciu przeszkody zawraca i wybiera inny kierunek jazdy.
Po uruchomieniu aplikacji w telefonie pojazd może przejść w tryb zdalnego sterowania. Komendy odbierane są przez moduł Bluetooth BTM222, a mikrokontroler ATmega8L steruje napędem przez układ L293D, obsługuje diody LED oraz reaguje na krańcówki wykrywające przeszkody.
Karta techniczna
AVT2931
Sterownik pojazdu Bluetooth z mikrokontrolerem ATmega8L, modułem BTM222, mostkiem L293D, obsługą dwóch serwomechanizmów po przeróbce i trybem automatycznego omijania przeszkód.
| Wersja | A+ – płytka PCB + zaprogramowany mikrokontroler |
| Typ projektu | pojazd sterowany przez Bluetooth |
| Tryby pracy | tryb automatyczny i tryb zdalnego sterowania |
| Mikrokontroler | ATmega8L, zaprogramowany w wersji A+ |
| Moduł Bluetooth | BTM222 |
| Komunikacja mikrokontrolera z Bluetooth | UART |
| Sterownik silników | L293D |
| Napęd | 2 przerobione serwomechanizmy modelarskie |
| Czujniki przeszkód | S1, S2 – przełączniki krańcowe |
| Sygnalizacja świetlna | diody D1-D2 jako kogut, D3-D4 jako oświetlenie drogi |
| Stabilizator napięcia | LT1117, napięcie 3,3 V dla modułu Bluetooth |
| Rezonator | 4 MHz |
| Zasilanie projektu | napięcie stałe doprowadzone do złącza Zas; w modelu użyto 4 baterii ok. 6 V |
| Nazwa urządzenia Bluetooth | Robot |
| Wymiary płytki PCB | 60×57 mm |
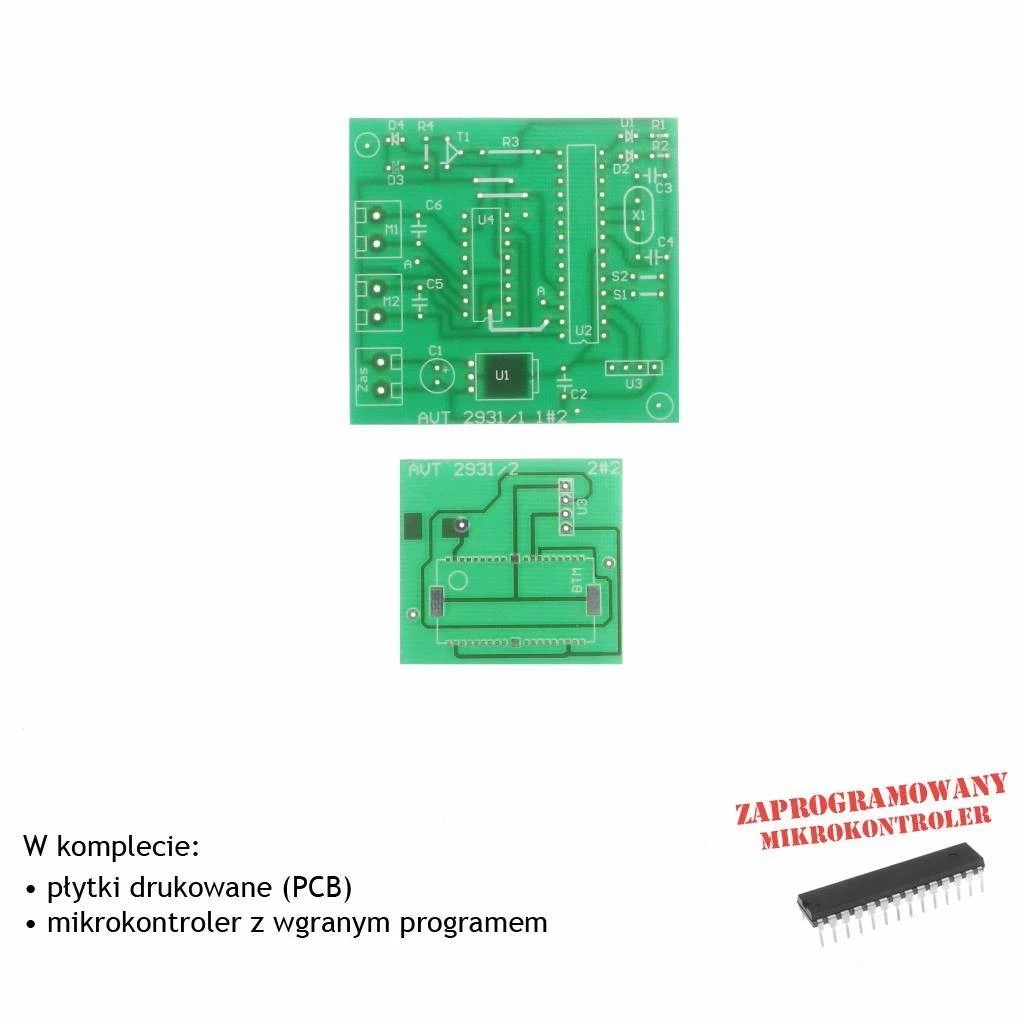
Wersja A+ – płytka PCB i zaprogramowany mikrokontroler
AVT2931 A+ zawiera płytkę PCB oraz zaprogramowany mikrokontroler ATmega8L przygotowany do pracy w tym projekcie. Pozostałe elementy elektroniczne z poniższego wykazu trzeba skompletować osobno.
Wykaz elementów
- R1-R3: 500 Ω
- R4: dobrać w zależności od użytych diod
- C1: 100 µF / 16 V
- C2: 100 nF
- C3, C4: 33 pF
- C5, C6: 100 pF
- D1: LED ultrajasna niebieska
- D2: LED ultrajasna czerwona
- D3, D4: LED białe
- T1: BC548
- U1: LT1117
- U2: ATmega8L
- U3: BTM222
- U4: L293D
- S1, S2: przełączniki krańcowe
- X1: rezonator 4 MHz
- 2 serwomechanizmy modelarskie do przeróbki
Notes
Wersja A+ zawiera mikrokontroler z wgranym programem, dlatego nie trzeba samodzielnie programować ATmega8L do podstawowego uruchomienia projektu.
Napęd wymaga przerobienia dwóch serwomechanizmów modelarskich: trzeba usunąć ich oryginalną elektronikę, wyprowadzić przewody z silników i odblokować obrót osi o 360°.
W dokumentacji opisano sterowanie z aplikacji Java uruchamianej na telefonie z Bluetooth. W praktyce kompatybilność aplikacji zależy od używanego telefonu i środowiska, dlatego warto sprawdzić dostępność odpowiedniego sposobu sterowania przed budową całego modelu.
Uwaga: Projekt wymaga wykonania części mechanicznej pojazdu, przeróbki serwomechanizmów oraz poprawnego połączenia modułu Bluetooth z płytką główną. Przed uruchomieniem trzeba sprawdzić zasilanie 3,3 V dla BTM222, kierunki pracy napędu i działanie czujników przeszkód.
Najczęściej zadawane pytania
Wersja A+ zawiera płytkę PCB oraz zaprogramowany mikrokontroler ATmega8L. Pozostałe elementy trzeba skompletować osobno.
Pojazd może pracować automatycznie albo być sterowany z telefonu przez Bluetooth. W trybie zdalnym odbiera komendy przez moduł BTM222.
Nie. To wersja A+, czyli płytka PCB i zaprogramowany mikrokontroler. Moduł Bluetooth, sterownik L293D, elementy bierne, diody LED, krańcówki, serwomechanizmy i pozostałe elementy należy dobrać osobno według wykazu.
Tak. W projekcie zastosowano dwa przerobione serwomechanizmy, w których wykorzystuje się silnik z przekładnią i odblokowuje obrót osi o 360°.





