

Mobik – sterownik robota mobilnego z ATmega328P - PCB do projektu AVT 5372

- Mobik AVT5372 to sterownik robota mobilnego z ATmega328P, driverem DRV8833, złączami czujników, I²C, UART i portami I/O. Wersja A zawiera komplet 4 płytek PCB: płytkę główną i 3 płytki czujników; elementy osobno.
Mobik – sterownik robota mobilnego z ATmega328P – płytki PCB AVT5372
Komplet płytek drukowanych do budowy miniaturowego sterownika robota mobilnego z obsługą silników, czujników i interfejsów komunikacyjnych.
Baza do budowy mobilnego robota
AVT5372 A to komplet płytek PCB do wykonania sterownika robota mobilnego Mobik. Projekt pozwala skrócić czas budowy elektroniki robota i skupić się na programowaniu, sterowaniu napędami, obsłudze czujników oraz testowaniu algorytmów jazdy.
Sercem układu jest mikrokontroler ATmega328P pracujący z napięciem 3,3 V i zegarem 16 MHz. Płytka główna zawiera zasilanie z akumulatora, stabilizatory 3,3 V i 5 V, sterownik silników DRV8833, wyjścia dużej obciążalności, odbiornik podczerwieni, klawiaturę analogową, wejścia dla dalmierzy HCSR-04 i SHARP GP2 oraz złącza I²C, UART i ISP.
Karta techniczna
AVT5372
AVT5372 to projekt miniaturowego sterownika robota mobilnego Mobik. Układ obejmuje płytkę główną sterownika oraz trzy płytki czujników pomocnych przy budowie platformy mobilnej.
| Kod projektu | AVT5372 |
|---|---|
| Wersja | A – płytki drukowane PCB |
| Typ układu | miniaturowy sterownik robota mobilnego |
| Mikrokontroler | ATmega328P |
| Napięcie pracy mikrokontrolera | 3,3 V |
| Częstotliwość taktowania | 16 MHz |
| Zasilanie | 5,5…10 V DC, akumulator 7,2 V lub zestaw baterii |
| Stabilizatory | 3,3 V dla procesora i peryferiów, 5 V dla czujników HCSR-04 i GP2 |
| Sterownik silników | DRV8833 |
| Obsługa napędu | dwa silniki DC lub jeden silnik krokowy |
| Prąd drivera silników | średnio 1,5 A na mostek, próg zabezpieczenia ustawiony na około 1 A |
| Wyjścia dodatkowe | PWM i OUT, otwarty dren, zwiększona obciążalność |
| Pomiar zasilania | pomiar napięcia akumulatora/baterii przez wejście ADC7 |
| Czujnik ultradźwiękowy | złącze dla HCSR-04 |
| Czujnik podczerwieni GP2 | złącze dla dalmierzy SHARP GP2 |
| Odbiornik IR | TSOP34836 |
| Wejścia / porty użytkownika | 2 porty analogowe i 2 porty cyfrowe I/O w standardzie 3,3 V |
| Interfejsy | I²C, UART, ISP Atmel 6-pin |
| Klawiatura | 3-klawiszowa klawiatura analogowa |
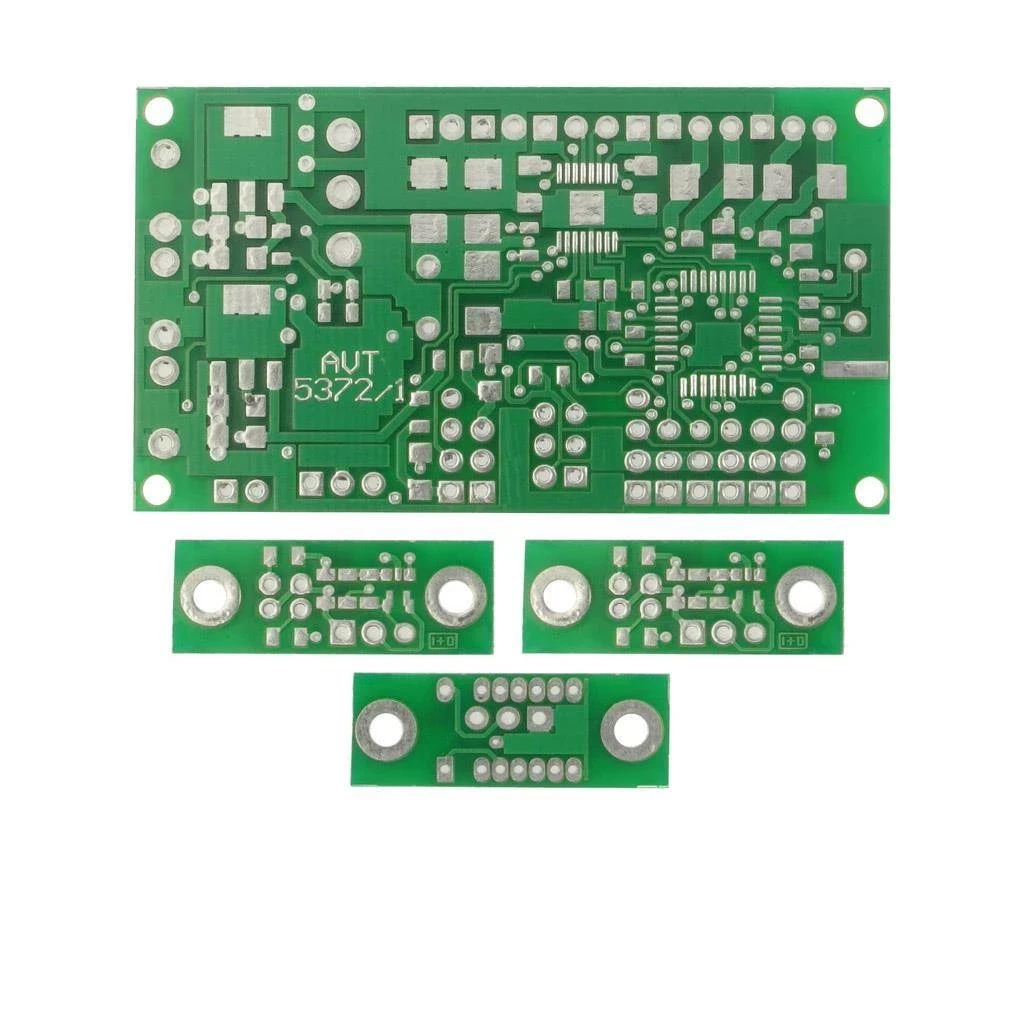
| Płytki w wersji A | 4 płytki drukowane: płytka główna i 3 płytki czujników |
| Wymiary płytki głównej PCB | 62×35 mm |
Wersja
AVT5372 A – płytki PCB. Elementy elektroniczne z poniższego wykazu trzeba skompletować osobno. Wersja A obejmuje komplet 4 płytek drukowanych: płytkę główną Mobika oraz trzy płytki czujników.
Wykaz elementów
Płytka główna Mobika
- Rezystory SMD 0805: R3, R9 – 2,2 kΩ
- Rezystory SMD 0805: R6, RM3, RS2, RUS2 – 22 kΩ
- Rezystor SMD 0805: RIS – 1 kΩ
- Rezystory SMD 0805: RK1…RK3, RUS1 – 10 kΩ
- Rezystory SMD 1206: RM1, RM2 – 0,22 Ω
- Rezystor SMD 0805: RS1 – 100 kΩ
- Kondensatory SMD 0805: C9, C10, C13, CID2, CM1, CS5 – 100 nF
- Kondensatory SMD 0805: C11, C12 – 22 pF
- Kondensator tantalowy SMD: CES1 – 47 µF / 10 V
- Kondensatory SMD 1206: CI, CIS1, CS1…CS4, CUS – 10 µF
- Kondensator SMD 0805: CM2 – 2,2 µF
- Kondensator SMD 0805: CM3 – 10 µF
- IRR: TSOP34836, odbiornik podczerwieni 3,3 V
- DP1, DP2: S1J, dioda uniwersalna SMD
- DZS1: P6SMB10, transil 10 V
- LD1: dioda LED SMD
- U3: ATmega328P TQFP32
- UM: DRV8833PWPR HTSSOP16
- US1: LM1117-3.3 SOT-223
- US2: LM1117-5.0 SOT-223
- QP1, QP2: IRLML0060PBF SOT-23
- AI0, AI1, DI0, DI1, OUT, PWM, IDS: złącze SIP3, raster 2,54 mm, proste
- FS1: bezpiecznik polimerowy 2 A
- IRV, BAT1, VBAT2, M1, M2: złącze SIP2, raster 2,54 mm, proste
- ISP: złącze IDC6 proste
- L1, LIS, LUS, FBI: dławik SMD 1 µH, 0805
- LM1: dławik SMD mocy 1 µH / 2 A
- PWR: wyłącznik suwakowy SL19121
- RSDI23, UDS, I2CA23: złącze SIP4, raster 2,54 mm, proste
- SK1…SK3: mikroprzełącznik 6×3 mm
- XTAL1: rezonator kwarcowy 16 MHz HC49S
Czujnik IDS
- R1: 4,3 Ω SMD 0805
- C1: 100 nF SMD 0805
- C2: 10 µF SMD 0805
- IDS: GP2Y0D810 lub GP2Y0D805, zależnie od wymaganej odległości detekcji 10 cm lub 5 cm
- J1: złącze SIP3, proste
Czujnik ILFS – wersja cyfrowa lub analogowa
- R1: 180 Ω SMD 0805
- R2: 22 kΩ SMD 0805
- R3*: 1 kΩ SMD 0805
- R4, R5*: 100 kΩ SMD 0805
- RV1*: 50 kΩ, potencjometr montażowy TS53
- C1: 100 nF SMD 0805
- IS1: QRD1114, transoptor odbiciowy
- J1: złącze SIP3, proste, raster 2,54 mm
- U1*: MAX9031AUK SOT-23-5
- * Elementy montowane zależnie od wersji czujnika: cyfrowej lub analogowej.
Notes
Płytka główna Mobika obsługuje napęd robota, pomiar napięcia akumulatora, podstawowe porty I/O oraz popularne czujniki odległości. Dzięki temu może być bazą do pojazdu mobilnego, robota śledzącego linię lub własnej platformy testowej.
Driver DRV8833 wymaga poprawnego przylutowania pada termicznego. To ważne dla prawidłowego odprowadzania ciepła oraz niezawodnej pracy układu podczas sterowania silnikami.
Mikrokontroler musi mieć wgrany odpowiedni program, aby sterownik wykonywał konkretne funkcje robota. Po wgraniu bootloadera i zastosowaniu przejściówki USB/RS można używać środowiska Arduino w trybie zgodności z Arduino Nano.
Uwaga: przed podłączeniem akumulatora, silników i czujników sprawdź polaryzację zasilania, dopuszczalne napięcia 3,3 V i 5 V, konfigurację pinów oraz prąd napędów. Nieprawidłowe połączenie silników, czujników albo zasilania może uszkodzić mikrokontroler, driver DRV8833 lub elementy peryferyjne.
Najczęściej zadawane pytania
AVT5372 A zawiera komplet 4 płytek PCB: płytkę główną sterownika Mobik oraz 3 płytki czujników. Elementy elektroniczne z wykazu trzeba skompletować osobno.
Mobik to miniaturowy sterownik robota mobilnego z mikrokontrolerem ATmega328P, driverem silników, wejściami czujników oraz interfejsami do rozbudowy platformy.
Driver DRV8833 pozwala sterować dwoma silnikami prądu stałego albo jednym silnikiem krokowym, z możliwością sterowania PWM.
Projekt przewiduje złącza dla dalmierza ultradźwiękowego HCSR-04, dalmierzy podczerwieni SHARP GP2, odbiornika IR oraz płytek czujników linii.
Nie. Mikrokontroler musi mieć wgrany odpowiedni program. Po przygotowaniu bootloadera i zastosowaniu interfejsu USB/RS można pracować ze środowiskiem Arduino w trybie zgodnym z Arduino Nano.





