

Dwustanowy sterownik serwomechanizmu - zlutowany KIT AVT 1605

- Przełączaj serwomechanizm między dwoma nastawionymi położeniami. AVT1605 C to zlutowany sterownik do montażu w obudowie lub własnym mechanizmie.
Dwustanowy sterownik serwomechanizmu - zlutowany AVT1605
Zlutowany sterownik do przełączania serwomechanizmu między dwoma ustawianymi położeniami roboczymi.
Zlutowany sterownik serwa do montażu w obudowie lub własnym mechanizmie
AVT1605 C to zlutowany układ sterownika serwomechanizmu modelarskiego, który pozwala ustawić dwa położenia ramienia i przełączać je wejściem SW. Sprawdza się w prostych mechanizmach, w których serwo ma wykonywać powtarzalny ruch między dwoma stanami.
Położenia robocze ustawia się potencjometrami PR1 i PR2, a mikrokontroler PIC12F675 generuje standardowy sygnał sterujący serwem. Wersja C wymaga zasilania 8...15 VDC, podłączenia serwomechanizmu, ustawienia położeń roboczych oraz montażu w obudowie lub własnym urządzeniu.
Karta techniczna
AVT1605
Zlutowany dwustanowy sterownik serwomechanizmu modelarskiego z dwoma nastawianymi położeniami, wejściem SW oraz wyjściem impulsów sterujących w standardzie serwa.
| Wersja | C – zlutowany układ |
| Funkcja | dwustanowe sterowanie serwomechanizmem |
| Zastosowanie | rygle, zapadki, klapki, przepustnice i proste napędy wykonawcze |
| Liczba położeń roboczych | 2, ustawiane potencjometrami PR1 i PR2 |
| Sterowanie położeniem | wejście SW, praca dwustanowa |
| Zakres impulsu sterującego | około 0,5...2,5 ms |
| Okres sygnału sterującego | 20 ms |
| Czas pełnego obrotu ramienia | około 1 s |
| Standard złącza serwa | Hitec |
| Mikrokontroler | PIC12F675 |
| Zasilanie wejściowe | 8...15 VDC |
| Zasilanie serwomechanizmu | 5 V ze stabilizatora 7805 |
| Sygnalizacja | dioda LED stanu pracy |
| Płytka PCB | 58×20 mm |
Wersja
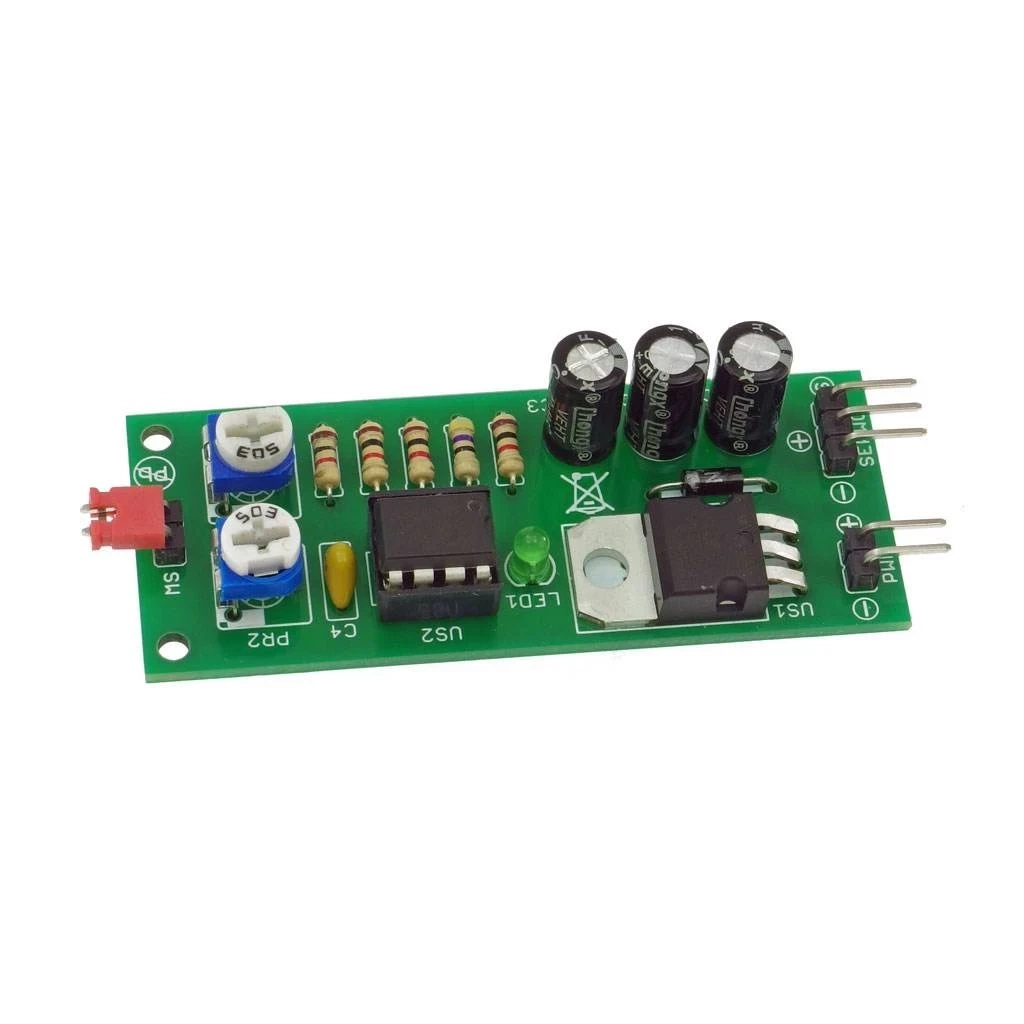
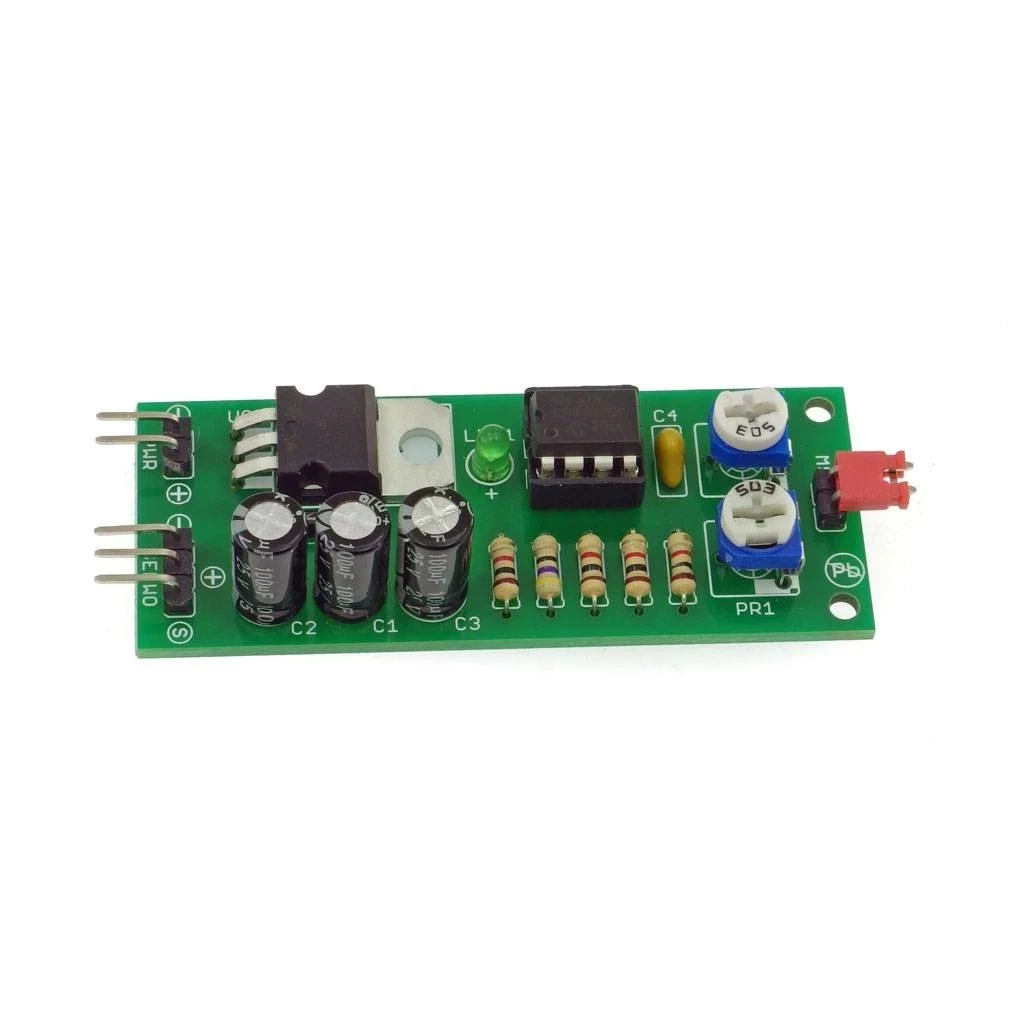
AVT1605 C – zlutowany układ. Wersja zawiera zmontowany sterownik serwomechanizmu z mikrokontrolerem PIC12F675, stabilizatorem 7805, potencjometrami PR1/PR2, wejściem SW i złączem SERVO. Układ wymaga zasilania 8...15 VDC, podłączenia serwomechanizmu, ustawienia położeń roboczych oraz montażu w obudowie lub własnym urządzeniu.
Notes
PR1 i PR2 ustawiają dwa położenia ramienia serwomechanizmu. Wejście SW wybiera, który potencjometr steruje aktualnym położeniem, dzięki czemu układ działa jak prosty sterownik dwustanowy.
Sterownik generuje impulsy co 20 ms. Czas impulsu zmienia się w zakresie około 0,5...2,5 ms, co pozwala ustawiać położenie serwa przez zmianę napięcia na wejściu ADC mikrokontrolera.
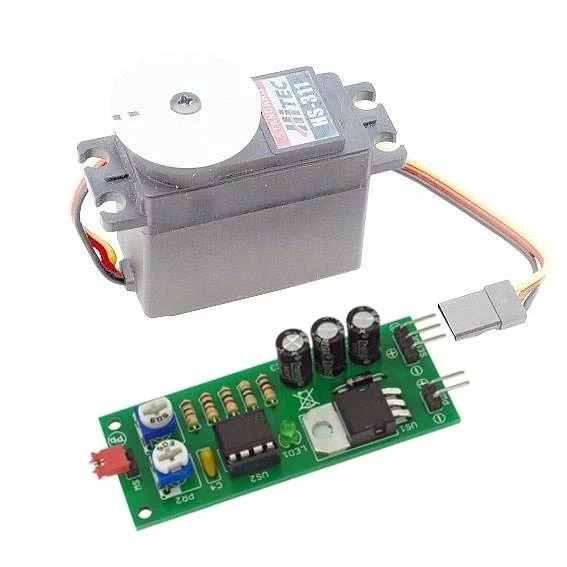
Złącze SERVO jest przygotowane w standardzie Hitec. Przed uruchomieniem trzeba sprawdzić polaryzację, zakres ruchu ramienia oraz to, czy mechanizm nie blokuje serwa w położeniach krańcowych.
Układ zasila serwo napięciem 5 V ze stabilizatora 7805. Przy serwach o większym poborze prądu należy uwzględnić nagrzewanie stabilizatora, spadki napięcia i wydajność źródła zasilania.
Uwaga: Przed podłączeniem serwomechanizmu trzeba sprawdzić polaryzację złącza SERVO, zakres ruchu mechanizmu oraz pobór prądu serwa. Zbyt duże obciążenie mechaniczne może powodować przeciążenie stabilizatora, spadki napięcia albo uszkodzenie serwomechanizmu.
Najczęściej zadawane pytania
AVT1605 C to zlutowany układ dwustanowego sterownika serwomechanizmu z mikrokontrolerem PIC12F675, stabilizatorem 7805, potencjometrami PR1/PR2, wejściem SW i złączem SERVO. Wymaga zasilania, podłączenia serwa i montażu w obudowie lub własnym urządzeniu.
Nie. To zlutowany sterownik serwomechanizmu. Do pracy trzeba podłączyć serwo, zasilanie 8...15 VDC oraz mechanikę, którą serwo ma poruszać.
Sterownik ustawia serwomechanizm w jednym z dwóch położeń wybranych potencjometrami PR1 i PR2. Sprawdza się w prostych mechanizmach, takich jak rygle, zapadki, klapki, przepustnice lub małe napędy wykonawcze.
Położenie wybiera wejście SW. Założenie lub zdjęcie zworki zmienia aktywny potencjometr, a tym samym pozycję ramienia serwomechanizmu.
Tak, serwomechanizm jest zasilany napięciem 5 V ze stabilizatora 7805 na płytce. Przy serwach o większym poborze prądu trzeba sprawdzić wydajność zasilania i nagrzewanie stabilizatora.
Film o projekcie
Do pobrania
