
Co to jest silnik krokowy - zasada działania i przeznaczenie

Silnik krokowy jest silnikiem elektrycznym, do którego zasilanie nie jest dostarczane w sposób ciągły, lecz przerywany, impulsowy. Każdy impuls, podany przez układ sterujący w odpowiedni sposób, powoduje nagłe obrócenie się wału silnika o ściśle zadany kąt zwany krokiem.
Z czego składa się silnik krokowy?
W jego wnętrzu znajdziemy oś oraz uzwojenia. W środku uzwojeń jest metalowy rdzeń. Całość została zamknięta w zwartej obudowie z wyprowadzonymi przewodami.
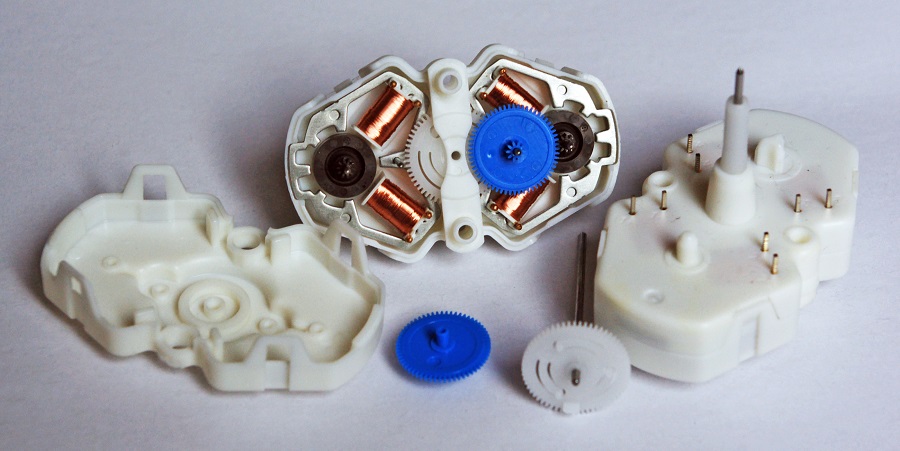
Na osi umieszczony został walec, który może być magnesem trwałym lub kawałkiem odpowiednio wyżłobionego, miękkiego magnetycznie ferromagnetyka.
Wewnątrz silnika krokowego nie znajdziemy komutatora, który jest nieodłącznym elementem znajdującym się na wyposażeniu każdego silnika prądu stałego. Komutacja w nich zachodzi dzięki zewnętrznemu układowi elektronicznemu. Bez tej dodatkowej elektroniki, silnik krokowy byłby bezużyteczny.
Zasada działania silników krokowych
Te urządzenia, mimo swojej prostoty, mają dosyć zmyślną zasadę działania. W handlu powszechne są trzy rodzaje silników krokowych - różnią się między sobą zasadą działania, co niżej zostanie wyjaśnione.
Silnik z magnesem trwałym (PM)
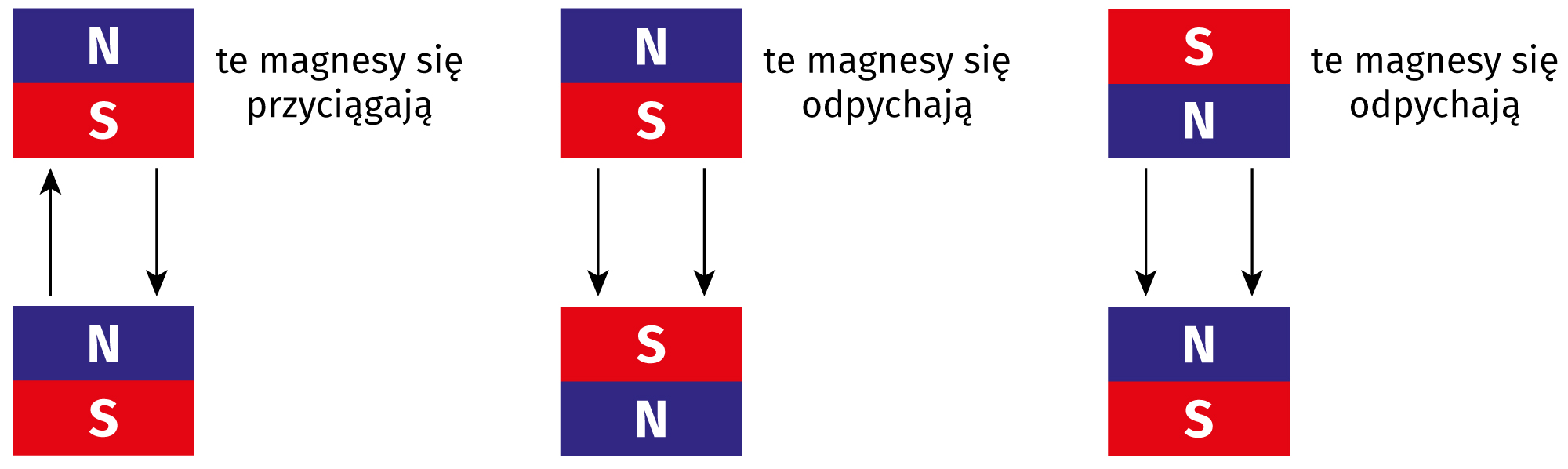
Ten rodzaj silników ma osadzony na osi magnes trwały, stąd ich anglojęzyczna nazwa - Permanent Magnet (PM). Idea ich funkcjonowania polega na odpychaniu się i przyciąganiu magnesów. Jeśli są ustawione do siebie tymi samymi biegunami (południowymi lub północnymi), wówczas działająca na nie siła powoduje ich odpychanie. Jeżeli zaś sąsiadujące ze sobą bieguny są odmienne, przyciągają się do siebie.
Warto przy tym zauważyć, że w elektromagnesie, który pod tym względem zachowuje się identycznie jak zwykły magnes, możemy bardzo łatwo zamienić bieguny miejscami. Wystarczy zmienić kierunek przepływu prądu przez jego cewkę, co dla układu elektronicznego nadzorującego jej prace jest niezwykle proste.
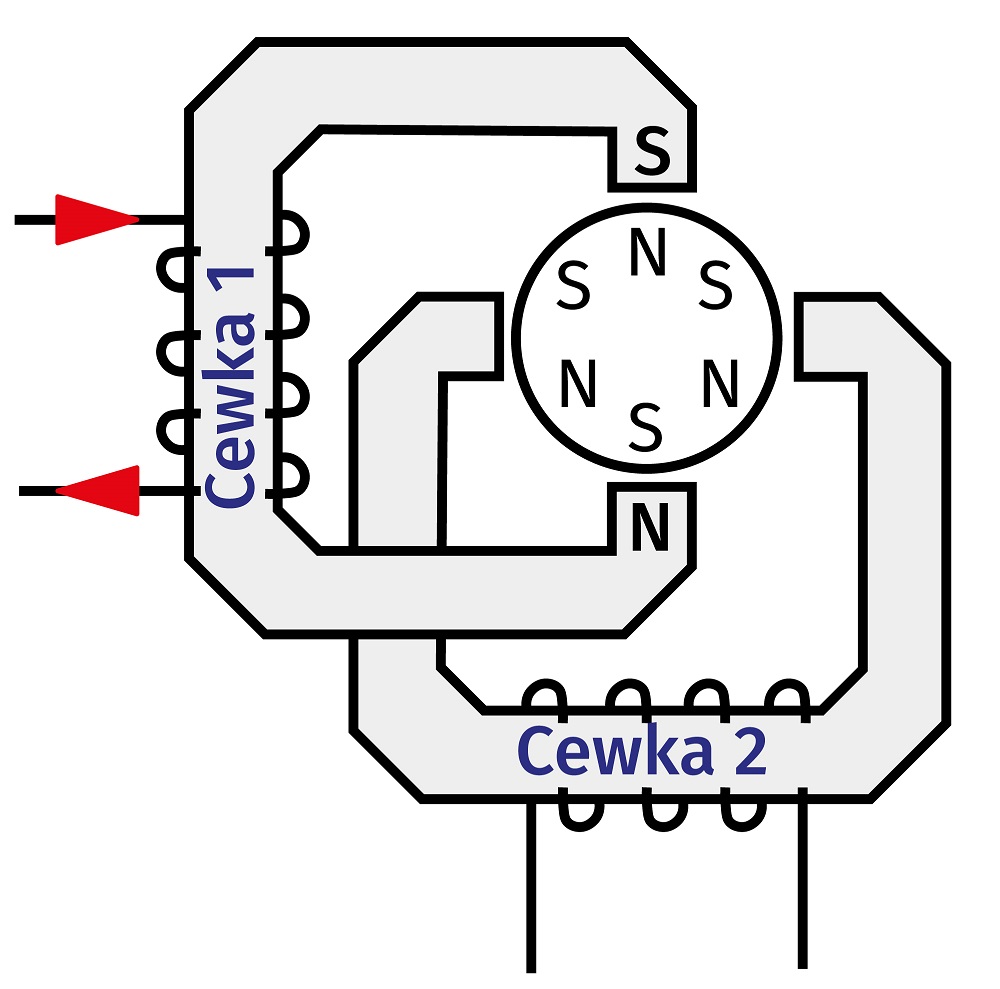
W najprostszym wydaniu wystarczą dwa elektromagnesy w kształcie litery C, obrócone o 90°, które swoim polem magnetycznym oddziałują na magnes osadzony na osi. Bieguny magnetyczne tego magnesu muszą być podzielone równolegle do wału.
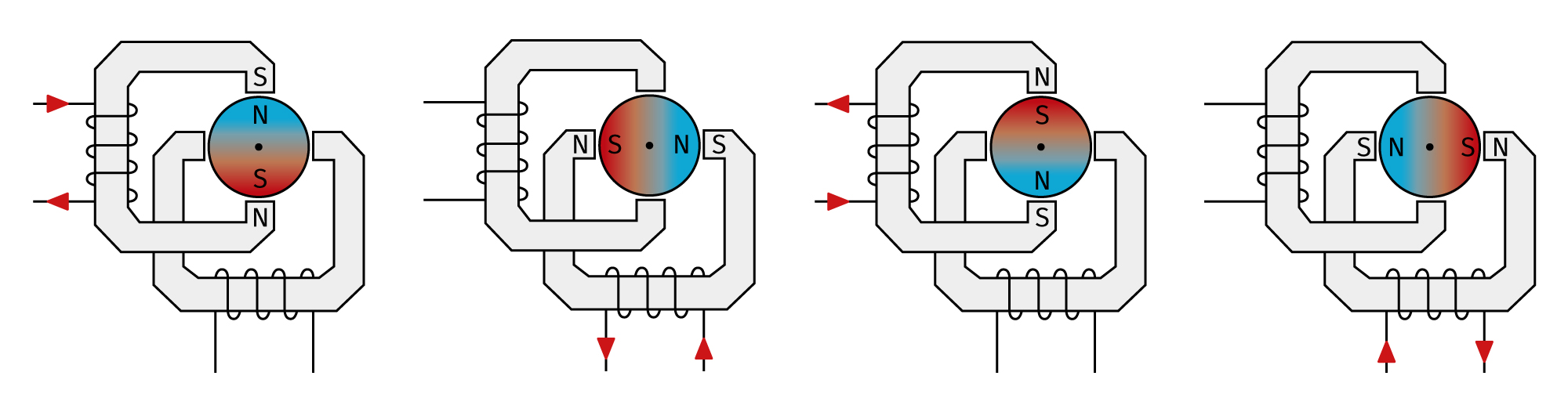
Uzwojenia są załączane naprzemiennie, a na dodatek za każdym razem prąd płynie przez nie w innym kierunku. Elektromagnes również ma dwa bieguny, jak magnes. Siła oddziaływania magnetycznego jest tutaj podwójna: z jednej strony magnes trwały odpycha się od tego samego bieguna, a z drugiej przyciąga do innego. Cztery takie przełączenia dają pełny obrót wału.
Powyższy silnik ma bardzo duży krok, bo wynosi on aż 90°. Najczęściej spotykane silniki krokowe z magnesem trwałym mają krok wynoszący 15° lub 7,5°. Wykonuje się je poprzez umieszczenie na wale magnesu z wieloma naprzemiennie ułożonymi biegunami.
Te silniki mają bardzo charakterystyczną cechę - jeżeli ich wał próbuje się obracać palcami, wykonuje to opornie, “skokami” odpowiadającymi kątowi obrotu o jeden krok.
Silnik o zmiennej reluktancji (VR)
W tych silnikach na osi nie ma magnesu trwałego, a zamiast niego jest kawałek stali. Ale nie byle jakiej stali - musi to być ferromagnetyk o odpowiedniej charakterystyce magnesowania. Ich działanie polega na cyklicznym ustawianiu się wirnika w położeniu zapewniającym najmniejszą reluktancję, stąd nazwa - Variable Reluctance.
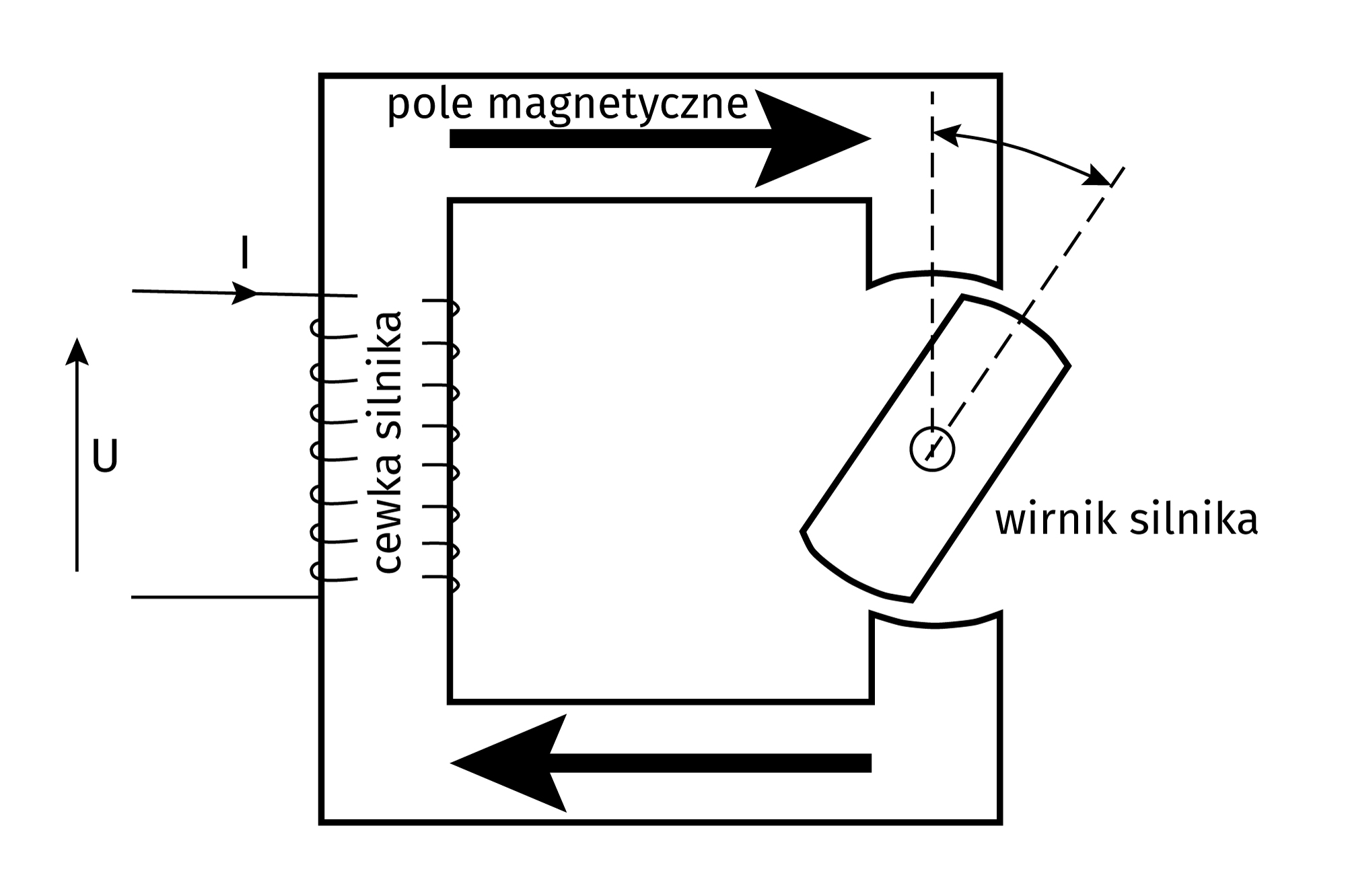
Co to jest reluktancja? Można ją rozumieć jako opór dla pola magnetycznego. Jeżeli w obwodzie magnetycznym istnieje przerwa (wysoka reluktancja), układ wytwarza siłę, która dąży do jej zmniejszenia. W ten sposób może obrócić ruchomy fragment magnetowodu (wirnik silnika) na poniższym rysunku, aby ustawił się w pionie i zapewnił niską reluktancję.
Najprostszy silnik krokowy o zmiennej reluktancji ma trzy uzwojenia, każde podzielone na dwie połówki, oraz wirnik z czterema wypustkami.
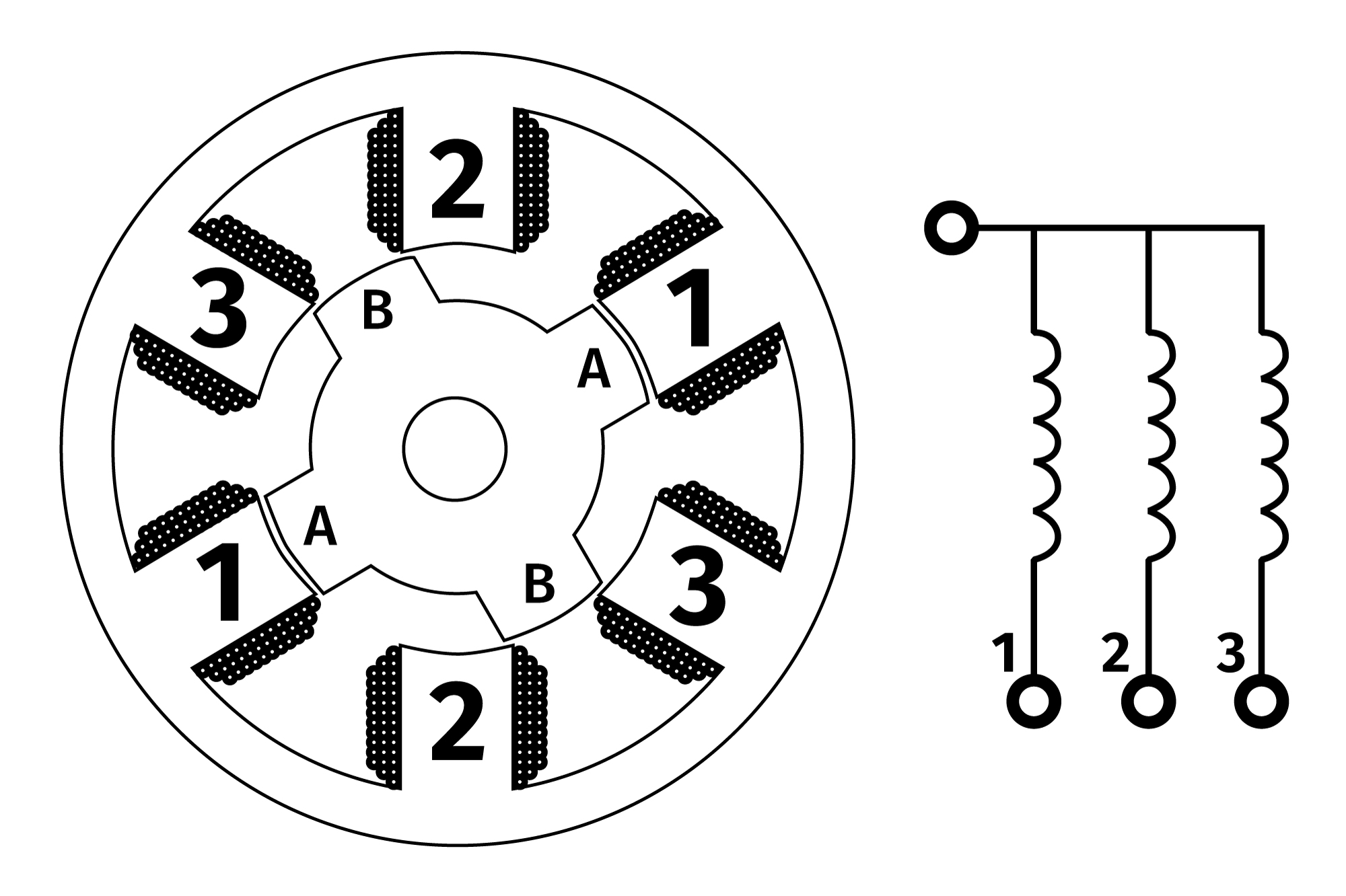
Po zasileniu cewki 1 (przyłożeniu zasilania między COM i 1), znajdujące się naprzeciw siebie cewki 1 przyciągną wypustki A. One zapewnią niską reluktancję dla pola magnetycznego między nimi.
Jeżeli w tym położeniu zostanie zasilone uzwojenie 2, wirnik obróci się lekko w prawo i wypustki B ustawią się w pionie. Następnym etapem jest załączenie cewki 3, przez co oś silnika znowu wykona nieznaczny obrót w prawo i ustawi wypustki A naprzeciw cewek uzwojenia 3.
Ciekawą właściwością silników o zmiennej reluktancji jest brak znaczących oporów przy obracaniu po wyłączeniu zasilania. W przeciwieństwie do silników z magnesem trwałym, nie ma charakterystycznego “przeskakiwania”. Ma to pewną wadę: wał silnika nie jest utrzymywany w miejscu po odłączeniu zasilania - brak momentu spoczynkowego - przez co może się samoczynnie przesunąć. Maszyna może wymagać każdorazowej kalibracji po włączeniu zasilania.
Silnik hybrydowy (HB)
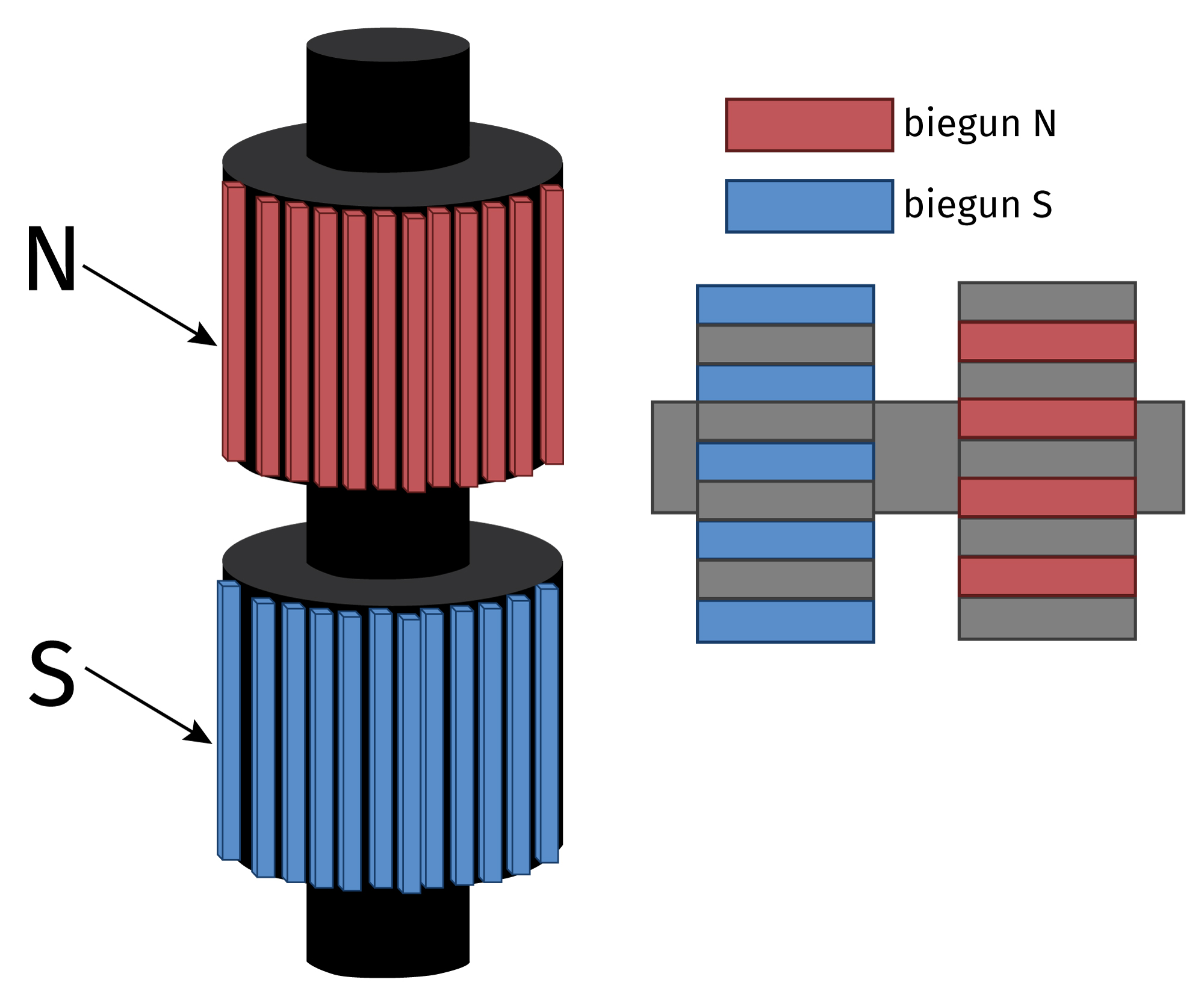
Silniki hybrydowe (HB od HyBrid) łączą cechy obu pokazanych wyżej silników. Ich rotor jest wykonany z magnesu trwałego, jak w silnikach z takim magnesem, ale z rowkami charakterystycznymi dla silnika o zmiennej reluktancji. Inny jest również sposób namagnesowania: jedna połówka wirnika jest biegunem południowym, a druga północnym.
//przerysować, najładniej gdyby część N zrobić niebieską, a S czerwoną http://silniki-krokowe.com.pl/wp-content/uploads/2014/10/wirnik-silnika-krokowego.png
Rowki i ząbki mają tę samą szerokość i na obu częściach mają dokładnie te same wymiary, lecz zostały przesunięte względem siebie: tam, gdzie jest ząbek na jednej części, wypada rowek na drugiej. Dzięki temu przesunięciu silnik może się obracać.
Na stojanie również są ząbki, ale równe na całej długości, bez przesunięcia. Działanie tego silnika jest kombinacją obu opisanych wyżej: wirnik próbuje ustawić się tak, aby zapewnić jak najmniejszą reluktancję, lecz jednocześnie zostaje przyciągany i odpychany przez leżące naprzeciw siebie pary uzwojeń.
Porównanie
Najtańsze w produkcji są silniki o zmiennej reluktancji, ale za to mają mały moment dynamiczny - wytwarzana przez nie siła, która obraca wał, jest niewielka. Nie mają również momentu spoczynkowego, który utrzymuje wał na swoim miejscu po wyłączeniu zasilania. Z tego powodu można je spotkać coraz rzadziej a ich produkcja powoli ustaje.
Silniki z magnesem trwałym posiadają moment spoczynkowy (ich wał nie daje się obracać bez oporów) oraz znacznie wyższy moment obrotowy niż silniki o zmiennej reluktancji. Ich wadą jest natomiast niewielka rozdzielczość, czyli dosyć duża wartość jednego kroku - 15° lub 7,5°. Precyzyjne pozycjonowanie wału nie jest możliwe bez zastosowania dodatkowych sztuczek przez układ sterujący.
Zalety obu silników łączą silniki hybrydowe: na jeden obrót mogą potrzebować nawet 400 kroków, więc rozdzielczość pozycjonowania takiego napędu jest bardzo wysoka. Niestety, rozwijane przez nie prędkości obrotowe nie są wysokie (wykonanie tylu kroków musi zająć trochę czasu) a ich cena również nie należy do najniższych. Za to są chętnie stosowane w przemyśle, gdzie rozdzielczość i moment dynamiczny to zalety przeważające nad ceną.
Sterowanie
Silniki krokowe mogą być wykonane jako bipolarne, unipolarne i uniwersalne. Zdradza to liczba wychodzących z obudowy przewodów.
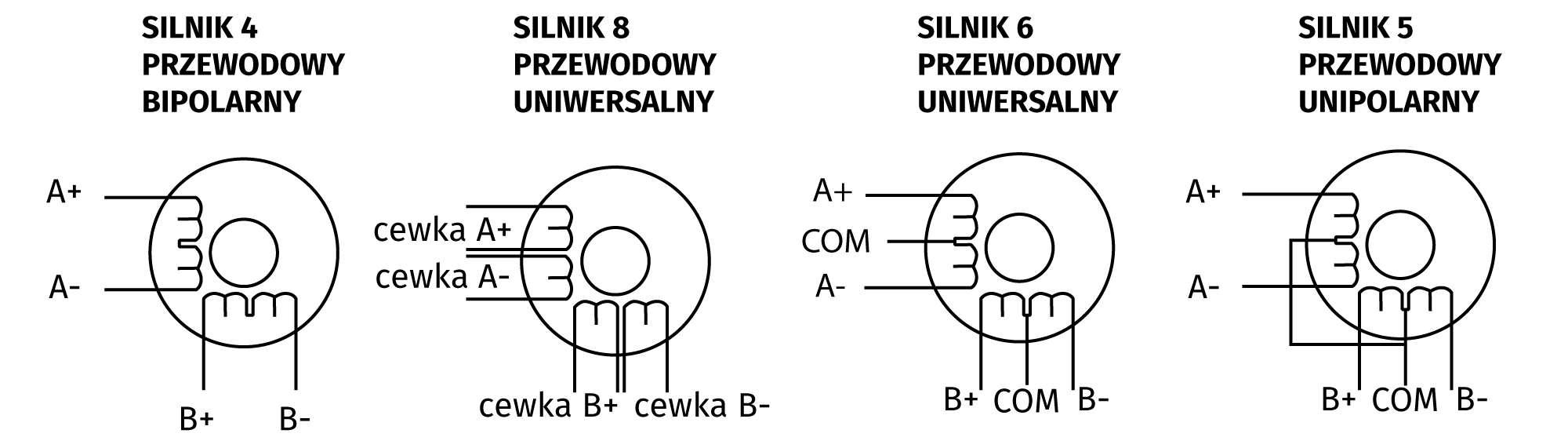
Jeżeli są bipolarne, mają cztery przewody. Sterowanie odbywa się poprzez naprzemienne zasilanie cewek prądem płynącym w odmiennym kierunku, jak w powyższym przykładzie z silnikiem z magnesem trwałym.
Silniki unipolarne są prostsze w sterowaniu, ponieważ nie wymagają zmiany kierunku prądu. Wystarczy po kolei załączać wszystkie cztery uzwojenia. Mają niższy moment dynamiczny niż silniki bipolarne, więc są rzadziej spotykane, zwłaszcza w zastosowaniach profesjonalnych. Zmiana kierunku pola magnetycznego odbywa się poprzez załączanie połówek uzwojenia nawiniętych w przeciwne strony.
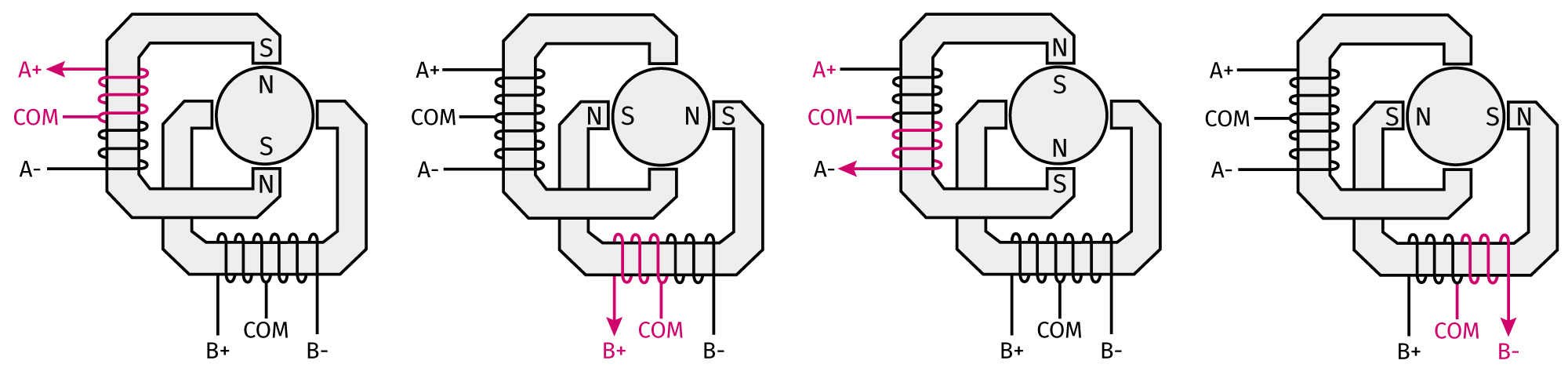
Silnikom unipolarnym wystarczy do działania pięć przewodów: jeden wspólny i cztery fazowe.
Silniki uniwersalne mają 6 i 8 przewodów. Jeżeli jest ich osiem, można uzwojenia łączyć zarówno do pracy unipolarnej, jak i bipolarnej - szeregowo i równolegle, zależy co chcemy osiągnąć. W silnikach z wyprowadzonymi sześcioma przewodami również mamy pewną dowolność: można je włączyć do pracy bipolarnej, jak i unipolarnej.
Wady i zalety silników krokowych
Silniki krokowe, w odróżnieniu od typowych silników prądu stałego lub przemiennego, mogą obracać się dowolnie wolno. Wykonanie jednego kroku na sekundę, godzinę lub nawet rok nie stanowi dla nich problemu. Za to maksymalna szybkość obrotowa jest ograniczona. Jeżeli wymusimy na silniku, aby obracał się szybciej niż potrafi, prawdopodobnie stanie bezradnie w miejscu.
Pewna wadą jest konieczność zaprzęgnięcia dodatkowego układu elektronicznego, który byłby odpowiedzialny za przełączanie uzwojeń. Bez niego, silnik krokowy nie wykona poprawnie ani jednego kroku. Jednak w dzisiejszych czasach ta wada jest niewielka, ponieważ elektronika stała się relatywnie tania.
Inną wadą jest relatywnie niska sprawność tego typu napędu przy niskich obciążeniach oraz niewielka moc w stosunku do masy i ceny. Klasyczne silniki prądu stałego lub przemiennego wypadają pod tym względem zdecydowanie lepiej. Dlatego silniki krokowe są stosowane tylko tam, gdzie jest to absolutnie niezbędne.
Przeznaczenie
Silniki krokowe są stosowane wszędzie tam, gdzie trzeba precyzyjnie ustalać położenie. Najpowszechniejszym zastosowaniem są wszelkiego rodzaju drukarki (w tym drukarki 3D), obrabiarki numeryczne i frezarki. To są najpowszechniejsze obszary, w których można znaleźć różnorakie silniki krokowe.
Silnik krokowy może obracać się dowolnie wolno, a jego wał zatrzymuje się w ściśle określonym położeniu, więc nadaje się również do pozycjonowania głowicy w napędach optycznych. Ta technologia powoli odchodzi do lamusa na rzecz elektronicznych nośników danych, ale nadal jest spotykana.
